Електрична опрема лифтова
 Лифт је циклична машина за подизање намењена за вертикално подизање људи и робе. По договору, лифтови се деле на путничке, теретно-путничке, болничке, теретне.
Лифт је циклична машина за подизање намењена за вертикално подизање људи и робе. По договору, лифтови се деле на путничке, теретно-путничке, болничке, теретне.
У зависности од брзине аутомобила, лифтови се деле на мале брзине (до 0,71 м / сек), велике брзине (од 1 до 1,6 м / сек), велике брзине (од 2 до 4 м / сек) и велике брзине (4 — 10 м / с) ... Носивост путничких лифтова је од 320 до 1600 кг, теретних - од 160-5000 кг. При брзини до 1,6 м / сек, електромотор је повезан са вучном гредом преко мењача, ако је брзина већа, онда се користе електрични погони без зупчаника.

Са широким избором опција дизајна за путничке и теретне лифтове, главни уређаји за њих су дизалице, ужад, аутомобил, противтег, механичка кочница и контролна опрема. Савремени лифтови имају систем суспензије противтеже и уже за противтеже.

Кабина се креће дуж вертикалних шина.Кабина је окачена за ужад који окружују вучну жицу и воде ременице електричног погона витла. На крајевима ужета налази се противтег који се креће дуж вођица. Маса противтеже је једнака збиру масе кабине и (0,42 — 0,5) масе терета (или половине највероватнијег оптерећења кабине).
Погони лифтова
У лифтовима и теретним лифтовима типови електричних погона се бирају у зависности од брзине кретања, спратности зграде и потребне тачности кочења. Тренутно су у употреби следећи електрични погони:
а) за зграде до 17 спратова користе се брзи и брзи лифтови брзине од 0,7 до 1,4 м / с носивости 320, 400 кг. Ови лифтови користе електрични погон са асинхроним двобрзинским електромотором са ротором у кавезу са веверицом,
б) за брзе путничке лифтове брзине 1,6 м/с, намењене за зграде до 25 спратова, електрични погон према систему тиристорског регулатора напона (ТРН) са двобрзинским асинхроним мотором (ТРН-АДД) се користи.

Присуство подесивог електричног погона обезбеђује високу глаткоћу процеса убрзања и успоравања, високу тачност заустављања на поду (до 20 мм) и одсуство секције са смањеном брзином пре заустављања. Други намотај мотора се користи за постизање мале брзине током ремонта,
в) за брзе и брзе лифтове користе се константни електрични погони по моторном систему тиристорског претварача-ТП-Д и наизменичне струје по систему фреквентни претварач-краткоспојни асинхрони електромотор ГГЦХ-АД.
Тиристорски електрични погон од лифта типа УЛМП-25-16
Напајање електромотора (сл. 1) врши се реверзибилним тиристорским регулатором напона УЗ (ТРН) при покретању и равномерном кретању и посебним исправљачем састављеним по једнофазном мостном колу УЗ1 за напајање. намотај статора при динамичком кочењу.
Систем обезбеђује параметарску фазну контролу брзине ротације кавезног асинхроног мотора. Систем аутоматског управљања је направљен на једночипном микрорачунару типа КР1816ВБ031 који врши директну дигиталну контролу брзине ротације двобрзинског асинхроног електромотора.
Систем аутоматског управљања обезбеђује високу тачност одржавања задате брзине и заустављања на нивоу захтеваног пода директно до задате тачке без дела са смањеном брзином. Други намотај мотора се укључује само током ремонта.
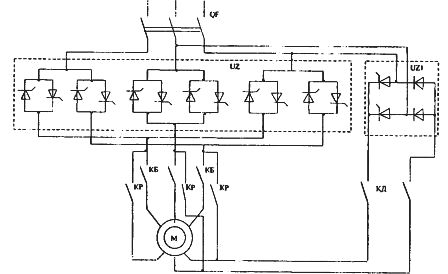
Пиринач. 1. Шема тиристорског електричног погона лифта
Кочиони соленоиди
Механизми за подизање лифтова су опремљени специјалним кочионим уређајима са краткоходним и краткоходним електромагнетима једносмерне струје, који су преко исправљача повезани на мрежу од 220 или 380 В.
Уређаји за управљање лифтом
Подни прекидачи дизајнирани за пребацивање кола контроле кретања. Они региструју положај аутомобила, аутоматски бирају правац кретања («горе» или «доле») и дају команду за искључивање електричног погона приликом кочења.Конструктивно, ово су троположајни (1-0-2) полужни прекидачи у три тачке (уређаји за контролу покрета) који имају покретне (на полузи) до фиксних (на телу) контакте.
Подни прекидачи су монтирани у шахту у нивоу пода, а у кабини постоји профилисана грана која делује на полугу подног прекидача.
Када се кабина помери "горе" окретањем полуге, једна група фиксних контаката се затвара, а "доле" - друга. Када је аутомобил у нивоу пода, подни прекидач је у неутралном положају «О» и фиксни контакти су отворени.

Прекидачи брзине су дизајнирани да дају импулс за смањење брзине пре заустављања возила. Користе се у брзим лифтовима са електричним погоном са двобрзинским извођењем. Изграђени су на принципу подних прекидача, али имају другачији дизајн. Прекидачи брзине се уграђују у окно рудника у комплету изнад и испод пода на растојању од 0,5 до 0,6 м.
Прекидачи са полугом су дизајнирани за управљање контролисаним теретним лифтовима. Структурно, ово су троположни прекидачи са полугом са самоповратком ручке у неутрални положај ("горе" -0- "дно"), монтирани у кабини. Окретањем ручке бира се правац кретања, што се постиже затварањем пара фиксних контаката. Када се ручка отпусти, контакти се отварају и мотор се зауставља (искључује). Прекидачи се истовремено користе као крајњи прекидач у крајњим положајима кабине. Ово се постиже дејством полуге на ваљак специјалних вођица у окну рудника.
Индуктивни сензори дизајнирани за употребу у брзим лифтовима. Дијаграм таквих сензора за наизменичну и исправљену струју приказан је на Сл. 2.
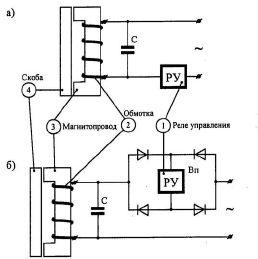
Пиринач. 2. Шематски дијаграм индуктивних сензора наизменичне (а) и исправљене (б) струје
У окну рудника је уграђено пластифицирано магнетно коло у облику слова У од челика 3, а на кабини се налази челични носач 4 који је магнетни шант. На магнетном колу налази се калем са намотајем 2, на који је управљачки релеј 1 повезан директно или преко Вп исправљача. Када стезаљка напусти (магнетно коло се отвара), индуктивни отпор завојнице је мали, што ће осигурати рад контролног релеја. Ако челични носач преклапа магнетно коло, индуктивни отпор завојнице нагло расте и релеј се ослобађа.
Поузданост и јасноћа рада контролног релеја обезбеђена је укључивањем капацитивности Ц паралелно са калемом, који се бира из услова добијања режима блиског резонанцији струја. Употреба исправљача за напајање контролног релеја повећава поузданост рада магнетног система релеја.
Поред тога, уређаји за херметичке контакте (реед прекидачи) се широко користе у сензорима путовања. Употреба индуктивних сензора елиминише такве недостатке подних прекидача и прекидача брзине као што су шум и радио сметње које произилазе из рада контактних уређаја.
Магнетно раслојавање је електромагнетни уређај инсталиран у кабини и контролише рад брава врата рудника. Магнетни граничник гранања повезан је са арматуром електромагнета грана.Када је кабина на поду, електромагнет гране се одзрачи, опругом заустављена брава откључава браву врата рудника, омогућавајући јој да се отвори.
Приликом кретања, електромагнет гране је под напоном — уводи се засун, који спречава отварање врата. Такве браве се користе у лифтовима старог дизајна (или модернизованим) са ручним управљањем вратима.

Аутоматизација лифтова
Основна разлика између рада лифтова и дизалица је њихов вишепозициони положај, који се изражава у чињеници да механизми могу заузети велики број фиксних положаја. Дакле, након сваког заустављања потребно је решити логички проблем избора следећег потеза. Решење овог проблема се тренутно имплементира коришћењем логичких чипова и микропроцесора. За шему управљања лифтом постављени су следећи задаци: контрола положаја кабине у окну, аутоматски избор правца кретања, одређивање времена почетка заустављања, тачно заустављање аутомобила на поду, аутоматско отварање. и затварање врата и заштита електромоторних погона и лифта.
Командни сигнали који постављају програм кретања аутомобила подељени су у два типа: „наређења“ која долазе из аутомобила и „позиви“ који долазе са слетне платформе. Команде се дају преко тастера који се налазе у кокпиту и поду. У зависности од одговора на команде и метода њихове обраде разликују се шеме одвојеног и колективног управљања.Са посебним принципом управљања, коло перципира и извршава само једну команду и током њеног извршавања не одговара на друге наредбе и позиве.
Ова шема је најједноставнија за имплементацију, али ограничава могуће карактеристике лифта и стога се користи само за лифтове у стамбеним зградама висине до девет спратова са релативно малим протоком путника. Са принципом колективног управљања, коло прима неколико команди истовремено и извршава их у одређеном редоследу, обично по редоследу спратова.

Основа система управљања лифтом је мерење пода сата. Проучавање сата може бити клатно, када се фиксирање врши у два смера, одоздо према горе и одозго надоле, иу једном правцу, на пример, само одозго према доле. Замах клатна се чешће користи.