Енкодери — Сензори ротационог угла
 Позиционирање у различитим врстама индустријске опреме се обезбеђује помоћу уређаја једноставног изгледа — енкодера (или другим речима, сензора угла).
Позиционирање у различитим врстама индустријске опреме се обезбеђује помоћу уређаја једноставног изгледа — енкодера (или другим речима, сензора угла).
Кодери се користе за претварање линеарног или ротационог кретања у бинарни дигитални сигнал. Енкодер је уређај чија је осовина повезана са ротирајућом осовином објекта који се проучава и обезбеђује електронску контролу угла ротације овог другог. По принципу рада енкодери се деле на оптичке и магнетне.
На осовини оптичког енкодера налази се диск са испрекиданим прозорима по ободу, наспрам којег се налази ЛЕД и фототранзистор, који обезбеђују формирање излазног сигнала у облику правоугаони импулсни возови са фреквенцијом пропорционалном и броју прозора и брзини ротације диска / осовине. Број импулса означава угао ротације.
Оптички енкодери су доступни као инкрементални и апсолутни енкодери.
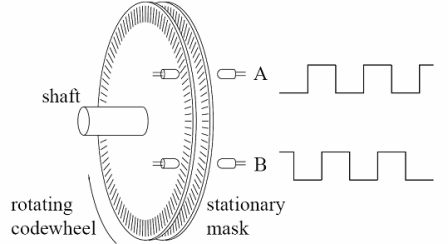
Инкрементални енкодери имају диск са прекидима са много прозора исте величине као основни радијус и два очитавања оптокаплери, што вам омогућава да поправите и угао ротације и смер ротације осовине.На додатном радијусу диска налази се један прозор за прекид и одговарајући оптоспојник који дефинишу почетну позицију (почетну).
Негативни обртни момент – Инкрементални енкодери обезбеђују релативно очитавање угла ротације, информације о којима се не чувају када се ротација заустави. Њихове предности укључују једноставност дизајна (и, сходно томе, ниску цену) при високој резолуцији и високој радној фреквенцији.
Инкрементални енкодери са повећаном издржљивошћу фокусирани су на индустријске примене - у машинству, ваљаоницама, бродоградњи, текстилу, обући, обради дрвета. За такве енкодере, одлучујући параметри су резолуција у углу ротације, способност рада на високим фреквенцијама, висок степен заштите да издрже услове оштре средине.
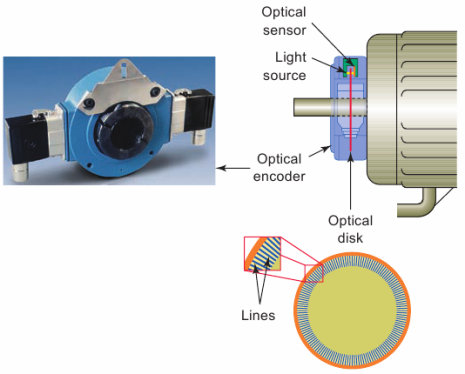
Диск са линијама или зарезима који прекидају светлосни сноп до оптичког сензора. Електронско коло осећа да се сноп прекида и генерише дигиталне излазне импулсе из енкодера.
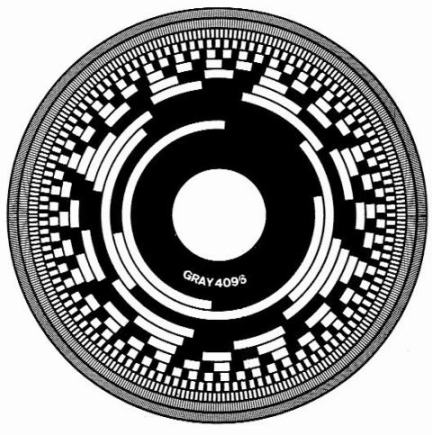
Диск за кодирање — уређај за претварање угаоних померања осовине у дигитални облик. Геометријска слика дигиталног кода се примењује на диск за кодирање. Симболи кодног бита се примењују на концентричној стази, а најмањи (мање значајни) битови се налазе ближе периферији.
У зависности од начина очитавања кода (контактни, фотоелектрични, електромагнетни, индукциони, електростатички итд.), геометријска слика кода се састоји од електрично проводне и електрично изоловане, провидне и непрозирне, магнетне и немагнетне итд.
Најраспрострањенији су били дискови за кодирање са варијантама бинарног кода, који искључују појаву грешака при преласку граница одвојених дискретних секција, када се неки битови могу читати на једној страни границе, а неки на другој (због непрецизне инсталације). уклоњивих уређаја или због неистовременог читања кода док се диск окреће. Ови кодови укључују такозвани Фау код (Баркеров код) и Рефлекс код (Грејев код).
Неки оптички ротациони енкодери користе рефлектујући диск енкодера. Овај диск има наизменичне делове који апсорбују или рефлектују светлост, а извор светлости заједно са пријемником налазе се на једној страни диска. Ако постоји само један извор светлости и пријемник, низ импулса сензора вам омогућава да сазнате колико корака је диск ротирао у односу на своју претходну позицију.
Сензор не може одредити правац ротације, али ако додате други пар извор-пријемник, 90 ван фазе од првог, тада ће микроконтролер моћи да одреди смер ротације диска на основу разлике у фази између пулс се убрзава.
Треба имати на уму да је сваки систем који детектује релативну ротацију диска, али не може да измери његову апсолутну угаону позицију, инкрементални енкодер.
Апсолутни енкодер има дисконтинуални диск са концентричним прозорима различитих полупречника чије су релативне величине одређене бинарним кодом и који се читају истовремено, дајући кодирани излазни сигнал за сваку угаону позицију (Граи код, бинарни код...).
У овом случају је могуће добити податке о тренутном положају осовине без дигиталног бројача или вратити на почетну позицију, пошто излаз има кодирану реч — «н бит», заштићен од електричног шума.
Апсолутни енкодери се користе у апликацијама које захтевају дуготрајно складиштење улазних података, али су сложенијег дизајна и скупље.
Апсолутни енкодери са интерфејсом фиелдбус имају излазни интерфејс за комуникацију са сабирницом поља у складу са стандардима ЦАНопен, ПрофиБус, ДевицеНет, Етхернет, ИнтерБус и користе бинарни код за одређивање угла ротације. Горе наведени комуникациони интерфејси се могу програмирати према бројним параметрима: нпр. смер ротације, резолуција импулса по обртају, брзина преноса.

Енкодери постављени на осовину мотора ефикасно обезбеђују прецизну контролу позиционирања. Такви енкодери се обично производе у верзији „рупа“, а специјалне спојнице су важни елементи њиховог дизајна, који омогућавају компензацију зазора осовине мотора.
Позиционирање под горе наведеним условима најефикасније обезбеђује магнетни енкодер, у коме се претварање угаоног померања осовине у електронски сигнал врши бесконтактно на основу Холовог ефекта, није повезано са ротацијом оптичког чопера унутар сензора и омогућава обраду сигнала са брзинама до 60.000 о/мин.
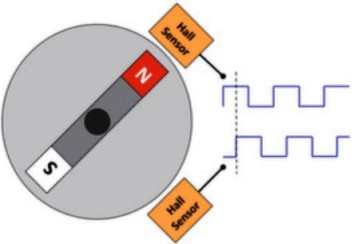
У магнетном енкодеру, брза ротација спољне осовине, на којој је фиксиран трајни цилиндрични магнет, се региструје помоћу Холовог сензора комбинованог на једном полупроводничком кристалу са контролером за обраду сигнала.
Када се полови трајног магнета ротирају преко микрокола са сензор у ходнику вектор променљиве магнетне индукције индукује Холов напон, који садржи информацију о тренутној вредности угла ротације вратила. Микроконтролер обезбеђује брзу конверзију Холовог напона у параметар угла позиционирања.

Могућност такве конверзије без директног механичког повезивања магнета и елемената Холовог сензора је главна предност магнетних енкодера, обезбеђује им високу поузданост и издржљивост и омогућава им да ефикасно раде у апликацијама великих брзина које се односе на индустријску аутоматизацију, штампање, обраду метала. , мерна и мерна опрема.